19.03.15. Xcos – это приложение, которое входит в состав системы математического моделирования Scilab, и предоставляет разработчикам возможности проектирования систем в области механики, гидравлики и электроники, а также систем массового обслуживания. Xcos представляет из себя графическую интерактивную среду, в основе которой лежит блочное моделирование. Приложение предназначено для решения задач динамического и ситуационного моделирования систем, процессов, устройств, а также тестирования и анализа этих систем. При этом моделируемый объект (система, устройство, процесс) представляется графически своей функциональной параметрической блок-схемой, включающей блоки элементов системы и связи между ними.
Мы расскажем об общих аспектах имитационного моделирования, а также познакомим с пакетом Xcos.
Концепция имитационного моделирования.
Основная задача моделирования состоит в том, чтобы дать разработчику технологию создания таких моделей которые достаточно полно и точно фиксируют свойства объектов оригиналов, поддаются исследованию и допускают возможность переноса результатов исследований на оригиналы. Моделирование представляет собой метод исследования, который является формой отображения действительности и заключается в воспроизведении свойств реальных объектов при помощи виртуальных объектов.
Все расчеты в компьютерной модели выполняются в так называемом системном времени, которое соответствует реальному времени функционирования объекта исследования или системы. Воспроизведение на компьютере развернутого во времени процесса функционирования системы с учетом ее взаимодействия с внешней средой называется имитационным моделированием. Имитационное моделирование наиболее мощный и универсальный метод исследования и оценки эффективности систем, поведение которых зависит от случайных факторов. Модели являются хорошим средством для обучения и подготовки специалистов, а также средством прогнозирования поведения объектов и систем. Моделирование позволяет проводить контролируемые эксперименты в ситуациях, когда проведение экспериментов на реальных объектах является нецелесообразным, опасным, невозможным или достаточно дорогостоящим.
Физическое моделирование связано с большими материальными затратами, поскольку требуется изготовление макетов и их трудоемкое исследование. Часто физическое моделирование просто невозможно из-за чрезвычайной сложности устройства. В этом случае прибегают к математическому моделированию с использованием компьютерных программ.
Общие сведения о пакете Xcos
В связи с повсеместным развитием современных компьютерных технологий существенно изменились подходы к решению проблем проектирования сложных технических систем. Как один из самых перспективных прикладных пакетов, в первую очередь, следует отметить систему математического моделирования Scilab, интеграция которой, с пакетом Xcos открывает новые возможности использования самых современных математических методов для решения задач динамического и ситуационного моделирования сложных систем, процессов, устройств начиная от структурного (математического) представления системы и заканчивая макетированием системы в реальном времени.
Пакет Xcos считается одним из лучших пакетов с открытым кодом для моделирования блочно заданных динамических систем и представляет из себя графическую интерактивную среду, с помощью которой можно производить моделирование имитацию и тестирование, анализ динамических систем при помощи блоков.
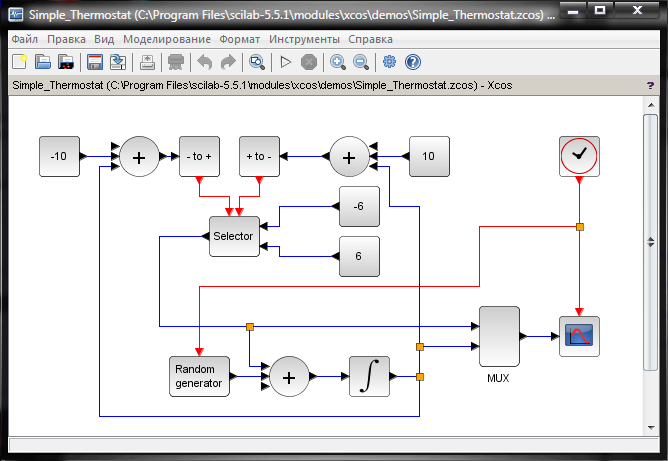
программная среда Xcos: пример Xcos-модели:
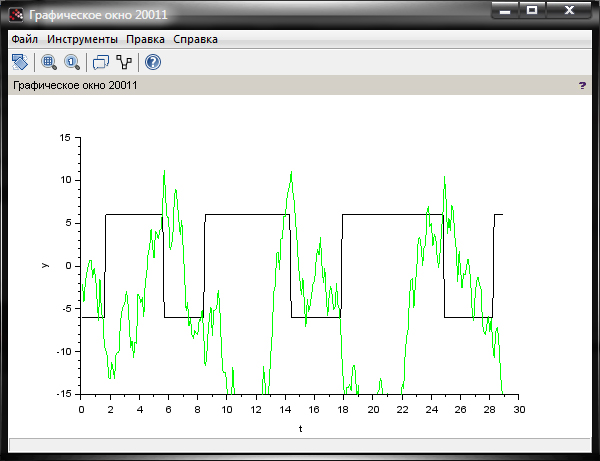
результаты ее работы:
При помощи Xcos можно создавать системы управления, системы обработки сигналов, системы связи, модели любых динамических систем. Xcos создан разработчиками Scilab (хорошо известной и популярной программной среды) и является, как отдельным пакетом, так и платформой для модельно ориентированного проектирования.
Xcos отличается от Scilab тем, что Scilab это высокоуровневый язык программирования, а Xcos – это система графического моделирования на основе блок-схем, которая состоит из предварительно скомпилированных библиотек. Для визуального представления сигналов в Xcos можно использовать различные блоки визуализации. Модели Xcos хранятся в файлах с расширением .zcos или .xcos. Модель можно открыть двойным щелчком мыши на файле модели в текущем каталоге или при помощи команды «Файл/Открыть» в Xcos.
В Xcos моделируемый объект (система, устройство, процесс) представляется графически своей функциональной параметрической блок-схемой, включающей блоки элементов системы и связи между ними. Функциональные блоки элементов моделируемой системы могут, в свою очередь, представлять вложенные подсистемы со своей организацией, образуя иерархические структуры. Ценность Xcos заключается и в обширной, открытой для изучения и модификации библиотеке компонентов (блоков).
Она включает источники сигналов с практически любыми временными зависимостями, масштабирующие, линейные и нелинейные преобразователи с разнообразными формами передаточных характеристик, квантующее устройство, интегрирующие и дифференцирующие блоки и т. д. Как программное средство Xcos - типичный представитель визуально-ориентированного языка программирования.
На всех этапах работы, особенно при подготовке моделей систем, пользователь практически не имеет дела с обычным программированием. Программа автоматически генерируется в процессе ввода выбранных блоков, их соединений и задания параметров. Для описания процессов, протекающих в технологических системах, могут использоваться различные типы объектов по характеру изменения во времени:
– дискретные (например, размер поверхности, качество в ходе технологического процесса);
– непрерывные, среди которых: апериодические (например, размерный износ инструмента), циклические (например, тепловые изменения оборудования за смену).
Практически для всех блоков существует возможность индивидуальной настройки: можно изменять как внутренние параметры блоков (количество входов) так и их внешний вид (размер).
Блоки, включаемые в создаваемую модель, могут быть связаны друг с другом, как по информации, так и по управлению. По информационным соединениям передаются данные, а по управляющим – сигналы активации. Блоки также могут иметь информационные и управляющие входы и выходы. Как правило, информационные входы и выходы блоков располагаются слева и справа от изображения блока, а управляющие сверху и снизу. Тип связи зависит от блока и логики работы модели. Данные, которыми обмениваются блоки, могут быть скалярными величинами, векторами или матрицами произвольной размерности.
Модельно-ориентированное проектирование обеспечивает раннее выявление ошибок. Xcos является основой для модельно-ориентированного проектирования, автоматической генерации кода, тестирования и верификации моделей, имеет открытую архитектуру для интеграции моделей из других инструментов. Необходимость разрабатывать модели устройств возникает по причине дороговизны и большого времени на изготовление прототипов. Е
сли вы разрабатываете систему управления либо какой-либо узел, у вас не всегда есть возможность опробовать связь с реальными объектами или возможность подключиться к испытательным стендам для того, что бы проверить свою модель либо систему управления. Вторая основная проблема заключается в том, что состыковать модели систем из разных сфер применения механики, гидравлики и электроники зачастую бывает очень сложно, потому что не существует универсальных сред разработки, которые могли бы объединять в себе все возможные сферы применения.
При создании моделей при помощи универсальных языков программирования аппаратный или программный датчик случайных чисел – единый инструмент разработчика для моделирования всех видов случайных факторов: случайных событий, случайных величин и процессов. У того, кто использует Xcos, арсенал значительно шире. Если же и этих средств Xcos окажется недостаточно, в модель могут быть включены инструменты, которые входят в состав ядра Scilab или других компонентов пакета.
Первая версия системы Scilab была разработана более 25 лет назад. Развитие и совершенствование этой системы происходило достаточно быстро одновременно с развитием средств вычислительной техники. В результате к настоящему времени Scilab представляет собой богатейшую библиотеку функций, единственная проблема работы с которыми заключается в умении быстро отыскать те из них, которые нужны для решения поставленной задачи. В 2014 году была выпущена обновленная версия пакета.
10 февраля 2014 года вышел новый релиз среды Scilab & Xcos (версия 5.5.1). Для установки Scilab & Xcos 5.5.1 рекомендуется следующая конфигурация компьютера:
- операционная система: Windows XP/Vista/7/8, Linux CentOS/Debian/Redhat/Fedora/Suse/Ubuntu – 32 и 64 bits;
- процессор c поддержкой SSE2;
- рекомендуемый объем оперативной памяти: 1 – 2 Gb;
- для полной инсталляции программы необходимый размер дискового пространства – 550 Mb.
Александр Чёрный
Комментариев нет:
Отправить комментарий